
К вопросу анализа направлений развития подводных необитаемых аппаратов стран блока НАТО и пути снижения их эффективности средствами РЭБ
И. ДУРНЕВ, капитан 3 ранга,
Д. ЕРМАКОВ, капитан-лейтенант,
И. ТИТКОВ, доктор технических наук,
доцент, капитан 1 ранга
Введение и постановка задачи исследования
Необитаемые подводные аппараты (НПА) в настоящий момент являются интенсивно развивающимся направлением подводной робототехники гражданского и военного назначения. Применение НПА в гражданском направлении подразумевает использование их в области изучения и освоения богатств мирового океана. В военном направлении НПА применяются в районах, опасных или недоступных для плавания подводных лодок и обитаемых подводных аппаратов. НПА дополняют традиционное подводное морское оружие и технику, а также существенно увеличивают боевые возможности сил флота. В настоящее время такие аппараты разрабатываются практически во всех странах, входящих в блок НАТО, а наиболее широко НПА представлены в ВМС США
Несомненно, появление такого рода устройств, направленных на эффективное выполнение ряда задач, как в гражданском, так и в военном направлении, может представлять угрозу национальной безопасности страны. Исходя из понимания этой проблемы, возникает вопрос: «Какие системы необходимо развивать в России, чтобы противостоять данным средствам, и как можно добиться снижения эффективности их применения?».
Данный вопрос обуславливает необходимость выполнения анализа текущего состояния и возможных направлений развития НПА, а также рассмотрения их как объектов радиоэлектронной борьбы (РЭБ).
Классификация НПА
В ряде работ представлена классификация самоходных НПА, согласно которой их разделяют на два больших подкласса: неавтономные (привязные) НПА и автономные необитаемые подводные аппараты (АНПА).
На рисунке 1 приведена классификация НПА.
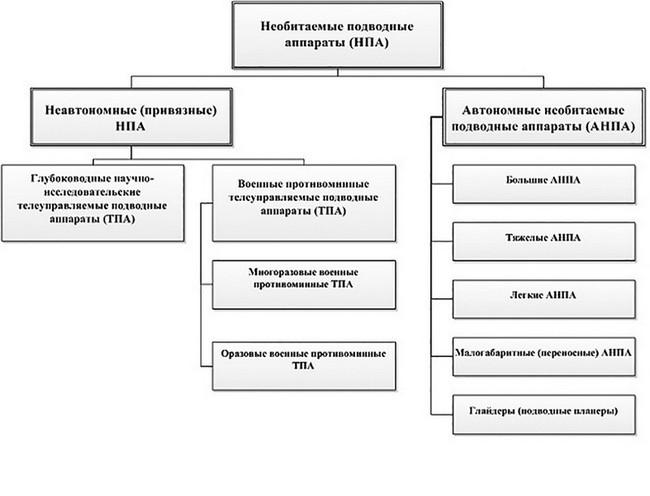
Из неавтономных НПА рассмотрены только самоходные аппараты (аппараты с движительной системой). Каждый из этих видов имеет свои преимущества, ограничения и недостатки. Рассмотрим их подробнее.
Глубоководные научно-исследовательские ТПА
Научно-исследовательские ТПА могут быть совершенно различными по своему виду и размеру. Так как высококачественное изображение является ключевым компонентом любого исследования, то все глубоководные научные ТПА в обязательном порядке комплектуются мощными осветительными системами и видеокамерами высокого разрешения. В зависимости от поставленной задачи, на научные ТПА могут устанавливаться самые различные специализированные датчики, пробоотборники или другие устройства. Кроме того, на них также обязательно присутствуют элементы, характерные для всех коммерческих рабочих ТПА, такие как манипуляторы и высокоточные системы навигации Большинство научных ТПА конструируются на глубину до 6000 м или близкую к ней. Так, на рисунке 2 представлен глубоководный научно-исследовательский ТПА DocRicketts производства США.

Многоразовые военные противоминные ТПА
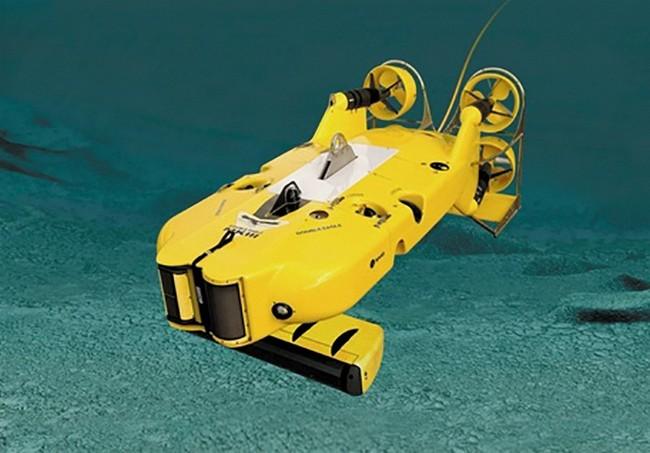
Противоминные действия проводятся тральщиками, осуществляющими поиск и уничтожение мин при помощи тралов различных типов — контактных, гидроакустических, электромагнитных. Появление усовершенствованных типов взрывателей мин снизило эффективность вытраливания и вызвало необходимость поиска новых подходов к выполнению противоминных задач. Выполнение этапов детектирования и классификации мин осуществляется с помощью гидролокаторов, установленных под килем судна или на внешнем носителе. В качестве носителя могут выступать буксируемое тело или ТПА, совершающий совместное движение с кораблем. Поиск и идентификация мин производится с помощью гидроакустической и телевизионной аппаратуры ТПА. Основным недостатком подходов с применением тральщиков и тральщиков-миноискателей является нахождение личного состава в потенциально опасной зоне. Использование ТПА для решения противоминных задач лишено данных недостатков.
На рисунке 3 представлен многоразовый военный противоминный ТПА DoubleEagleMK-3 производства Швеции.
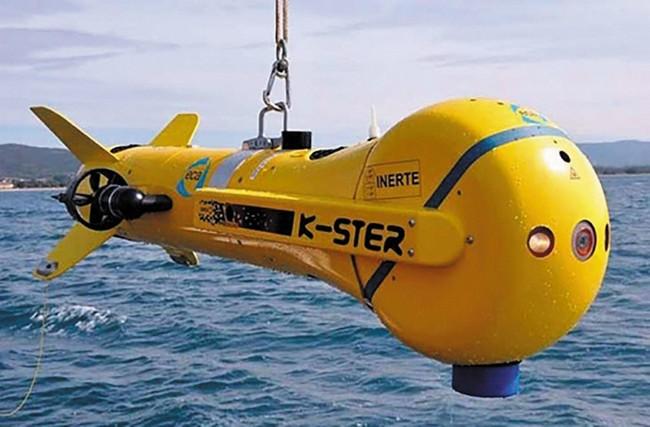
Одноразовые военные противоминные ТПА
Все описанные выше большие телеуправляемые противоминные аппараты являются, по сути, многоразовыми. Они очень дорогостоящие, и подрыв на мине даже одного такого аппарата наносит существенный урон носителю ТПА, так как обычно на его борту имеются всего 1–2 подобных аппарата. Поэтому конструкторы начали разрабатывать другое направление в противоминной борьбе, вместо одного дорогостоящего аппарата корабль стали комплектовать несколькими маленькими подводными телеуправляемыми аппаратами. Так начала развиваться концепция одноразовых аппаратов. Маленькие одноразовые аппараты атакуют любую мину, независимо от того, якорная она или донная, и делают это быстро, эффективно и безопасно для всех других систем, участвующих в противоминных действиях. Недостаток одноразовых аппаратов заключается в их неспособности эффективно бороться с сильными течениями и долго осуществлять поиск объектов [2, с. 60].Одноразовый военный противоминный ТПА K—Ster производства Франции представлен на рисунке 4.
Неавтономные (привязные) НПА зависят от обеспечивающего корабля (судна). При этом радиус действия этих аппаратов ограничен длиной кабеля, по которому осуществляется управление. Поэтому неавтономные (привязные) НПА не представляют интереса как объекты РЭБ, в отличии от АНПА.
Первая официальная классификация АНПА военного назначения была опубликована в Комплексном плане развития необитаемых подводных аппаратов ВМС США (The Navy Unmanned Undersea Vehicle MasterPlan, November 9, 2004) Этим документом определено 4 класса (категории) АНПА: малогабаритные (переносные), легкие, тяжелые и большие.
Кроме размеров, автономные подводные аппараты могут классифицироваться по типу движителя, по типу корпуса, по типу выполняемых задач и т. д. Задачи, решаемые АНПА в военном отношении, представлены на рисунке 5.

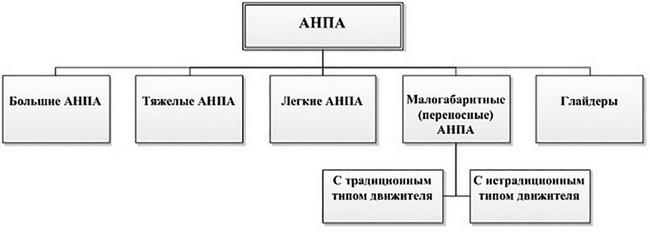
Рассмотрим АНПА согласно классификации по размерам, а также отдельно выделим класс подводных планеров (глайдеров) согласно рисунку 6.
Большие АНПА
По классификации ВМС США, к классу больших АНПА относятся аппараты весом более 1500 кг. Диаметр данных АНПА — более 90 см, вес — до 9000 кг. Они могут запускаться как с надводных кораблей, так и с подводных лодок, могут выполнять все виды действий, в том числе самостоятельный запуск малых АНПА или буксирование дополнительных платформ. Их автономность может быть более 400 часов. Пример большого АНПА Echo Ranger производства США представлен на рисунке 7.

Тяжелые АНПА
По классификации ВМС США, к классу тяжелых АНПА относятся аппараты весом от 250 до 1500 кг. Диаметр данных АНПА — 53 см, вес — 1360 кг, автономность должна быть в 2 раза больше, чем у легких, то есть около 40–80 часов. В составе этого класса имеются аппараты, запускаемые с подводных лодок. Один из представителей тяжелых АНПА изображен на рисунке 8.

Легкие АНПА
По классификации ВМС США к классу легких АНПА относятся аппараты весом 50–250 кг. Диаметр данных АНПА — около 32 см, вес — до 225 кг, примерно соответствуют аналогичным характеристикам легких торпед ВМС. Полезная нагрузка может быть в 6–12 раз больше, чем у малогабаритных аппаратов, а автономность в 2 раза больше. На рисунке 9 представлен легкий АНПА Remus-600 производства США.

Малогабаритные (переносные) АНПА Разделены на два подкласса:
с традиционным типом движителя,
с нетрадиционным типом движителя.

Под термином «традиционный тип движителя» в данном случае рассматривается только один тип — ходовой винт. Эти аппараты диаметром корпуса 7,6-22,8 см и весом 11–45 кг имеют при минимальной полезной нагрузке автономность 10–20 ч. Для этого класса нет особых ограничений по типу корпуса [2, с. 101]. На рисунке 10 представлен малогабаритный АНПА с традиционным типом движителя Remus-100 производства США.
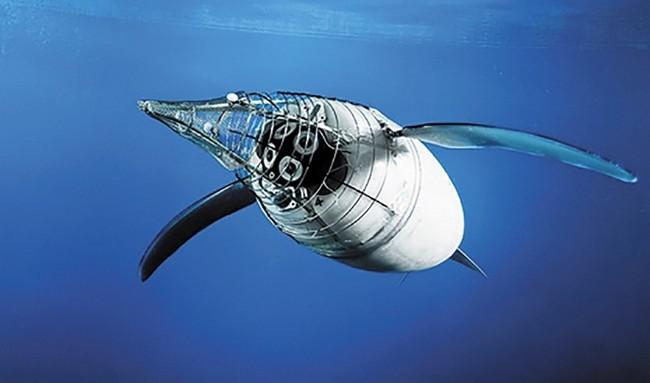
Под термином «нетрадиционный» рассматриваются любые другие типы движителей, кроме ходового винта. Таких движителей много, каждый из них реализует движение своим особым способом и каждый имеет свои несомненные преимущества по сравнению с остальными в конкретных условиях. Принцип движения может быть механическим (колесные, гусеничные), гравитационным (глайдеры — подводные планеры) или имитирующим движения живых организмов (рыба, краб, скат, черепаха, пингвин, угорь, медуза) . На рисунке 11 представлен малогабаритный АНПА с нетрадиционным типом движителя Aqua Penguin производства Германии.

Глайдеры
Подводный планер (глайдер) — автономный подводный аппарат, приводимый в движение за счет изменения плавучести. Вертикальный импульс всплытия или погружения преобразуется в горизонтальный, изменением относительного положения центров (тяжести, плавучести, давления). Указанный принцип движения позволяет резко сократить расход энергии, что в свою очередь позволяет принципиально увеличить дальность плавания, хотя и с небольшой скоростью. Глайдеры несут на себе датчики для замера температуры, электрической проводимости (для вычисления солености), скорости течений, флуоресценции хлорофилла, для определения глубины, оптического или акустического рассеяния. Навигация глайдеров осуществляется с помощью периодической фиксации положения по GPS, когда аппарат всплывает на поверхность по датчикам давления, угла наклона и магнитному компасу. На рисунке 12 представлен глайдер Slocum Electric производства США.
Перспективным направлением развития подводных необитаемых аппаратов является использование их в режиме «стая». АНПА, объединенные в группы (стаи), уже используются для выполнения множества морских работ военного двойного и гражданского назначения.

Но еще более широкое применение этой технологии ожидается в самом ближайшем будущем. Стая характеризуется сложным, непредсказуемым поведением, которое подчиняется единой цели и внешне выглядит как интеллектуальное, как бы синхронизированное извне, массовое действие. Однако поведение стаи является всего лишь результатом множества локальных взаимодействий ее участников во времени и пространстве на основе трех базовых поведенческих принципов: не сталкиваться, выравнивать скорости, держаться вместе. На рисунке 14 представлены различные АНПА, готовые к применению в режиме «стая».

«Стая», представляющая собой облако «умной пыли», образованное множеством миниатюрных АНПА, формирует сетецентрическое информационное поле, используемое координаторами в режиме реального времени. Подобные аппараты часто являются теряемыми (невозвращаемыми). «Стая» характеризуется масштабируемостью, то есть возможностью практически неограниченного расширения количества АНПА в искусственном сообществе. Одновременно «стая» отличается высокой отказоустойчивостьюи гибкостью, то есть при потере одного или нескольких АНПА, выполнит поставленную задачу в любом случае. Ключевое свойство морских АНПА стайного применения — их небольшой размер. Такие аппараты, помимо снижения эксплуатационных затрат, могут безопасно для персонала и окружающей среды исследовать в поточном режиме ранее недоступные места (подо льдом, на дне, в котлованах, расщелинах, вблизи других объектов со сложным рельефом, и т. д.). В военном отношении перспективным является использование АНПА в режиме «стая», особенно для сбора данных об условиях подводной среды в районе предполагаемых действий подводных лодок.
Возможные пути снижения эффективности НПА средствами РЭБ
Анализ военных действий последних десятилетий позволяет сделать вывод о том, что результат ведения военных действий во многом достигается не количественной характеристикой применяемых сил, а применением той или иной стратегии ведения военных действий, основанной на использовании новых наукоемких технологий. В этих условиях сетецентрическая концепция ведения военных действий является одним из центральных элементов возможных подходов к проблеме информационного противоборства и накладывает определенный отпечаток на процесс программно-целевого планирования развития технологий и средств информационного противоборства, т. е. средств РЭБ. Сущность РЭБ в настоящее время заключается во временном или постоянном снижении эффективности применения средств разведки, оружия, боевой техники противника путем радиоэлектронного или огневого подавления (уничтожения) его радиоэлектронного оборудования, систему управления, разведки, связи.
В ряде работ отмечено, что сетецентрический подход к ведению военных действий подразумевает использование большого количества объединенных в сеть необитаемых аппаратов, поставляющих информацию о территориях и акваториях противника. Информация, полученная подобными роботизированными устройствами, поступает на системы боевого управления сил, участвующих в операции (корабли, самолеты, необитаемые аппаратыи т. д.), которые находятся в едином информационном боевом пространстве.
Термин «радиоэлектронная борьба» означает совокупность согласованных мероприятий и действий войск (сил) по радиоэлектронному поражению радиоэлектронных объектов противника, радиоэлектронной защите своихрадиоэлектронных объектов, а также по противодействию техническим средствам разведки противника. Радиоэлектронная борьба включает: радиоэлектронное поражение, радиоэлектронную защиту, противодействие техническим средствам разведки противника и радиоэлектронно-информационное обеспечение мероприятий и действий по РЭБ.
Радиоэлектронно-информационное обеспечение — это совокупность мероприятий и действий по выявлению функционирования РЭС противника в целях их радиоэлектронного поражения и контролю функционирования своих РЭС в целях их радиоэлектронной защиты.
Повышение боевой устойчивости собственных сил при отражении ударов противника является одной из конечных целей РЭБ как вида оперативного (боевого) обеспечения.
Классические методы гидроакустического обнаружения применительно к АНПА становятся малоэффективны из-за их малых размеров. Поэтому для повышения боевой устойчивости собственных сил и, соответственно, снижения эффективности применения подводных необитаемых аппаратов противника, предлагается применение новых физических принципов обнаружения АНПА в интересах РЭБ. Одним из вариантов реализации данных предложений является использование гидрофизических каналов мониторинга подводной обстановки.
Учитывая, что в естественной океанической среде постоянно происходят динамические процессы и явления (течения, апвеллинги, турбулизация гидрологических параметров по глубине, ветровое воздействие на приповерхностные слои воды и т. д.), то фоновые состояния по пространству и времени оказываются очень изменчивыми и необходимы специальные методы обработки целевой информации для получения достоверности обнаружения АНПА. Перспективные исследования в области гидрофизических средств подводного обнаружения направлены на решение проблем разработки гидродинамической фоноцелевой модели с учетом наиболее информативных физических полей гидросферы, аэрогидродинамической фоноцелевой модели на границе раздела «вода — воздух» и в приводном слое атмосферы в интересахдистанционного мониторинга источников гидродинамического возмущения с маневренных корабельных и авиационно-космических сил и средств флота.
Первые гидрофизические средства, предназначенные для обнаружения возмущений от подводных объектов, появились за рубежом к концу Второй мировой войны. В конце 50-х — начале 60-х годов были развернуты первые отечественные исследования по физическому обоснованию принципов построения аппаратурных комплексов обнаружения гидрофизических возмущений от движущегося подводного объекта и по решению достаточно сложных инженерных и технологических вопросов их создания.
В литературе приводится схема модели гидрофизического следа подводного объекта (ПО) странблока НАТО, представленная на рисунке 15.
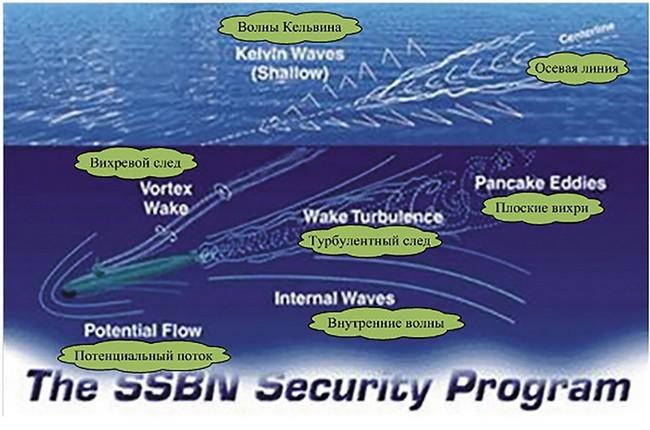
При движении ПО в морской среде возникают области возмущений и аномалии гидрофизических полей, которые характеризуются энергетическими и структурными параметрами.
Эти поля приводят к различному образованию возмущений (аномалий) морской среды в виде, представленном на рисунке 15.
Пространственно-временная изменчивость является характерной чертой гидрофизических полей в океане. Масштабы этой изменчивости широко варьируются. Из-за турбулентного характера движения вод океана в нем могут существовать флюктуации, минимальные размеры которых определяются действием молекулярных сил, а максимальный пространственный масштаб изменчивости гидрофизических полей в океане обуславливается геометрическими размерами океанских бассейнов, т. е. может достигать нескольких тысяч километров.
Суть способов освещения подводной обстановки по гидрофизическим каналам заключается в использовании гидрофизических полей (температуры, электропроводности и т.д.) для визуализации подводной обстановки, в результате которой строятся соответствующие изображения. Данные способы позволяют обнаружить аномалии различного характера, что обеспечивает выполнение задач мониторинга подводной обстановки в целях радиоэлектронно-информационного обеспечения радиоэлектронной борьбы.
Заключение и выводы
Сущность радиоэлектронной борьбы концептуально и достаточно полно должна характеризоваться ее целями, поэтому в современном понимании радиоэлектронная борьба организуется и ведется в целях дезорганизации управления войсками (силами) и оружием противника, снижения эффективности ведения им разведки и применения оружия и обеспечения устойчивого управления своими войсками (силами) и оружием.
Таким образом, проведенный в работе анализ дает возможность сформулировать следующие выводы:
- В качестве мер адекватного противодействия современной морской угрозе странами блока НАТО планируется применение перспективной робототехники — необитаемых аппаратов, сочетающих оптимальный показатель критерия «стоимость — эффективность», малое водоизмещение и скрытность с высокой боевой мощью.
- Необитаемые подводные аппараты способны кардинальным образом изменить структуру и состав военно-морских сил флотов. Развитие этого направления способствует появлению и развитию новых технологий и научных направлений, таких как оптоволоконная связь, движители разного рода, нанотехника, новые материалы, в том числе легконаполнители с малым удельным весом, микроэнергетика, робототехника и т.д.
- Широкое разнообразие НПА обеспечивает выполнение различных функций, от исследования Мирового океана до выполнения специальных задач военного назначения.
- Противодействие подобным НПА в настоящее время, по всей видимости, будет являться одним из приоритетных направлений дальнейшего развития ВМС флотов мира, при этом одним из важнейших условий разработки НПА в интересах ВМФ является их невысокая стоимость.
- Большинство НПА имеют малые размеры, поэтому классические методы гидроакустического обнаружения становятся малоэффективны, при этом скрытие изменений физических полей любых подводных объектов (в том числе НПА) является весьма затруднительным.
- Целесообразно в интересах выполнения задач радио электронно-информационного обеспечения радиоэлектронной борьбы использование гидрофизических каналов мониторинга подводной обстановки для повышения эффективности мероприятий РЭБ и, соответственно, снижения эффективности применения подводных необитаемых аппаратов.
ЛИТЕРАТУРА:
- Лушов В.В., Титков И.В. Радиоэлектронные системы ВМС иностранных государств как объекты радиоэлектронной борьбы. // Петродворец, ВМПИ ВУНЦ ВМФ «ВМА», 2013. —436 с.
- Тарасенко А.А, Краснов В.А., Смирнов К.А., Кирьянов А.В., Хан Р.Е. Зарубежные самоходные необитаемые морские аппараты. Малахит, 2016.
- Л. Бочаров. Микроробототехника. Необитаемые подводные аппараты: состояние и общие тенденции их развития// Электроника: наука, технология, бизнес. № 7. 2009. С.62-69.
- Красильников Р.В. Системы борьбы с необитаемыми аппаратами —асимметричный ответ на угрозы XXI века / Инфо-да, СПб., 2013. —106 с.
- US Department of the Navy, The Navy Unmanned Undersea Vehicle (UUV) Master Plan, November 2004.
- Титков И.В., Божьев А.Н. Особенности и перспективы развития радиоэлектронной борьбы военно-морского флота в сетецентрических условиях ведения военных действий // Тематический сборник «Радиоэлектронная борьба в Вооруженных Силах Российской Федерации —2017» — Москва, 2017. С.79–83.
- Ячменев А.В., Титков И.В., Ильин А.П. Современное состояние, особенности и перспективы развития радиоэлектронной борьбы Военно-Морского Флота в сетецентрических условиях ведения военных действий. // Известия Российской академии ракетных и артиллерийских наук №2 (92) — СПб, 2016.
- Гузенко В.Ф., Морареску А.Л. Радиоэлектронная борьба. Современное содержание // «Радиоэлектронная борьба в Вооруженных Силах Российской Федерации —2017» —Москва, 2017. С.14–15.
- Леньшин А.В. Бортовые системы и комплексы радиоэлектронного подавления // Воронеж: Научная книга, 2014. —590 с.
- Осипов В. Ю., Ильин А. П., Фролов В. П., Кондратюк А. П. Радиоэлектронная борьба. Теоретические основы. Учеб.пособие для вузов // Петродворец: ВМИРЭ, 2006. —302 с.
- Тынянкин И. Информационные возможности радиотехнического вооружения кораблей ВМФ России // Морской сборник №7 —2003 С.14–24.
- Брамсон М.А., Ермош В.К., Сохацкий С.К., Черницкий В.В. Гидрофизические средства освещения подводной обстановки // Наука Санкт-Петербурга и морская мощь России СПб., 2002 — Т.2 С. 439–445.
- The SSBN Security Program. Michael L. McHugh, Captain, U.S. Navy.
- Титков И.В., Карюк С.А., Старцев Э.В. Применение метода моментных инвариантов в интересах идентификации объектов радиоэлектронной борьбы. // Актуальные проблемы защиты и безопасности: Труды XIX Всероссийской научно-практической РАРАН. Том 4. СПб, 2016. С. 48–494.
- Патент на изобретение РФ № 2582073. Способ определения аномалий на морской поверхности неконтактным радиолокационным методом. Ляпин К.К., Титков И.В., Глебов И.В. Опубликовано: 30.03.2016.