

Задача преодоления войсками минно-взрывных заграждений на сегодняшний день сохраняет свою актуальность в отечественной и в зарубежной теории и практике военного дела. Это объясняется опережающим развитием минного оружия в сравнении со средствами преодоления минно-взрывных заграждений, низкой живучестью подразделений, привлекаемых к проделыванию проходов, и другими факторами.
Развитие мин всегда шло в соответствии с техническим прогрессом. От наполненной порохом бочки с запалом, который приводился в действие человеком, до высокоинтеллектуального боеприпаса, способного думать и принимать решение на уничтожение цели, действующего самостоятельно или в составе интеллектуального минного поля, способного к самовосстановлению и передачи данных о противнике оператору на пульт управления. В армиях наиболее развитых стран мира уделяют большое внимание разработке новых мин и совершенствованию уже имеющихся.
Современные образцы инженерных мин вполне обеспечивают возможность снизить темпы наступления противника, нанести ему существенные потери при сравнительно небольших затратах сил и средств.
Действительно, мина — это «самый совершенный солдат». Она никогда не спит, никогда не устает, не требует еды и тепла, всегда готова к бою, никогда не промахнется.
Как показывает анализ вооруженных конфликтов в мире (Ирак, Ливия, Афганистан, САР), объем применения мин постоянно возрастает, что существенно снижает мобильность войск, вызывает у личного состава минную боязнь, заставляет искать решение проблемы преодоления заграждений.
Как свидетельствует история, средства преодоления минно-взрывных заграждений появлялись по мере совершенствования самих мин. Как только мины получали новые функции, приспособления, взрыватели и т.п., средства преодоления минно-взрывных заграждений начинали модернизироваться, совершенствоваться или разрабатывались новые средства, способные их обезвредить.
Примером этому является появление на полях сражений Первой мировой войны танков. 15 сентября 1916 года английскими танками модели МК-1 осуществлен прорыв позиций немцев на реке Сомма шириной 5 км и глубиной до 40 км. Новому оружию нечего было противопоставить. Пулеметы против брони были бессильны, обычные полевые пушки эффективно бороться с танками не могли, на разработку специальных противотанковых пушек с высокой начальной скоростью снаряда требовалось время. Единственным средством, способным остановить танки, оказались мины. До конца войны немцы выпустили почти 3 миллиона штук противотанковых мин, на которых союзники потеряли 28 % танков. Активное применение немцами минного оружия заставило союзников обзавестись средствами преодоления минных полей. В 1918 году англичане применили опытный катковый противоминный трал, установленный на тяжелом танке Mark V (рис.1). Танк толкал впереди себя несколько тяжелых катков диаметром 60 см каждый, нанизанных на единую ось, рычаг от которой другим концом крепился к корпусу танка [1].

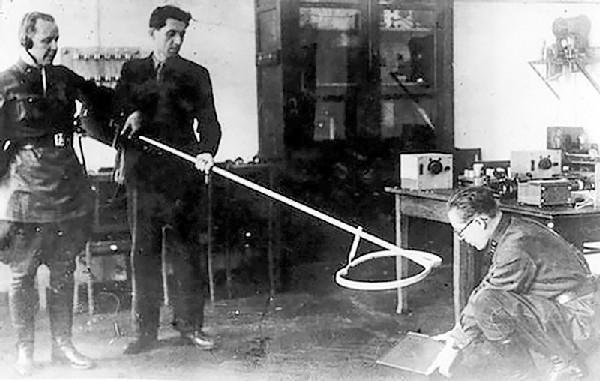
Как известно, активно использоваться мины начали с 30-х годов ХХ века. В это время и появились первые средства поиска мин — ручные миноискатели. С помощью ручных миноискателей саперы обнаруживали инженерные мины и обезвреживали их или уничтожали накладным зарядами. В Советском Союзе миноискатель был создан в 1936 году военным инженером Б.Я. Кудымовым (рис. 2) [2]. Усовершенствованный к 1939 году он применялся советскими войсками в советско-финской войне 1939 — 1940 гг. и в Великой Отечественной войне 1941–1945 гг.
Для проделывания проходов в минных полях применялись подрывные заряды. На раннем этапе своего развития они представляли собой примитивное сочетание одной или нескольких тротиловых шашек на длинном шесте или веревке.
В таком виде заряды укладывались или разбрасывались в створе проделываемого прохода, затем подрывались при помощи детонирующего шнура. Но широкого применения они не получили и применялись единично.
В Великой Отечественной войне, по сравнению с Первой мировой войной, увеличилось применение бронетанковой техники. Решающая роль в наступательных операциях отводилась танковым соединениям и частям. В противовес им широкое применение во всех видах боя нашли взрывные заграждения. За время войны Советской армией израсходовано более 70 миллионов различных мин, в том числе около 30 миллионов противотанковых. При этом глубина минных полей к концу войны, как правило, составляла 100 и более метров.
Это не могло не повлиять на развитие средств преодоления минно-взрывных заграждений. Во втором периоде войны, когда Советской армией проводились крупные наступательные операции, возросли объемы применения противником минно-взрывных заграждений. Для обеспечения успешного преодоления массовых минно-взрывных заграждений советскими военными инженерами начинают широко использоваться противотанковые тралы и удлинённые заряды разминирования.
В послевоенное время армии двух соперничающих блоков, НАТО и Варшавского договора, активно вооружались. Этот период ознаменован большим количеством вооруженных конфликтов в ходе каждого из которых враждующие стороны активно применяли минно-взрывные заграждения и средства их преодоления. Ярким примером является война во Вьетнаме.
Американской стороной применялись уже стоящие на вооружении мины и активно испытывались новые. С целью сковывания действий вьетнамской армии осуществлялось дистанционное минирование с использованием авиации и артиллерии. Минно-взрывные заграждения устраивались в больших объемах на все больших площадях как на переднем крае, так и в глубине контролируемой вьетнамской армией территории. Вьетнамская сторона также активно применяла минно-взрывные заграждения. Вышедшая в июне 1969 года американская служебная инструкция по опыту минной войны признавала, что в 1965 году число потерь личного состава морской пехоты США на минах и ловушках в Южном Вьетнаме составили до 75 % от всех потерь. Даже после всех принятых мер в 1968 году такие потери все еще составляли 37,7 % [1]. Приведенная статистика свидетельствует, в первую очередь, о несовершенстве средств преодоления минно-взрывных заграждений, стоявших на вооружении американской армии в тот период. Примерно на том же уровне находились рассматриваемые средства и в других ведущих армиях мира.
Постоянный рост применения инженерных мин, их модернизация и развитие технологий на рубеже середины ХХ века заставили военных ученых задуматься о создании робототехнических комплексов, которые позволили бы исключить непосредственное участие личного состава в проделывании проходов в минно-взрывных заграждениях.
В истории развития робототехники можно выделить четыре основных этапа [3].
Первый этап (с античности до середины XVI века) — период осмысления и формирования социального облика будущих роботов. В этот период появились идеи создания технических средств, похожих на человека, и первых механических устройств.
Второй этап (с середины XVI до конца XIX века) — период механизации и зарождения технического облика будущих роботов. Во время перехода от ручного производства к машинному стали закладываться основы дистанционного управления машинами и механизмами.
Третий этап (с конца XIX до середины ХХ века) стал периодом дистанционного управления машинами и механизмами и зарождения автоматизации процессов управления. Появился и сам термин «робот». Его предложил чешский писатель К. Чапек.
Огромные человеческие потери на фронтах Первой мировой войны определили главную цель создания роботов военного назначения — минимизировать присутствие человека в агрессивных для него средах (применение химического оружия и минно-взрывных средств, высокая плотность огня и т. д.).
Идея подвижной инженерной мины, управляемой на расстоянии по радио, возникла в самом начале XX века и была реализована французским изобретателем Шнейдером, который создал ее опытный образец, приводимый в действие с помощью радиосигнала. Уже в ходе Первой мировой войны Франция в 1915 году, а затем США и Великобритания применили управляемые по проводам и по радио инженерные мины для подрыва наземных объектов противника.
На полях сражений Второй мировой войны Германия применяла самоходные мины «Голиаф» (Goliath В Sd Kfz 303) (рис.3), управляемые по проводам. Это оружие считалось малоэффективным из-за высокой стоимости, низкой скорости и проходимости, уязвимости провода и тонкой брони, которая была не в состоянии защитить самоходную мину от любого противотанкового оружия.
Именно в это время военная робототехника выделилась в отдельное направление. Появились боевые машины, летательные аппараты и механизмы, управляемые дистанционно как по проводам, так и по радио, сформировались способы применения дистанционно управляемых машин, появились признаки автоматизации управления машинами и механизмами.
Четвертый этап (с середины ХХ века до настоящего времени) — период автоматизации и зарождения искусственного интеллекта. Этот период характеризуется интеллектуализацией и стремлением к уменьшению размеров роботов. На данном этапе получили динамическое развитие и было выделено три поколения роботов.
Роботы первого поколения были предназначены в основном для выполнения заранее запланированной (жесткой) последовательности операций, диктуемой тем или иным технологическим процессом при строго определенных и неизменных условиях эксплуатации.
Второе поколение роботов — очувствленные роботы с адаптивным управлением, способные выполнять задачи в изменяющихся условиях эксплуатации, отличающиеся от роботов первого поколения существенно более широким набором датчиков, особенно датчиков внешней информации, более сложной и совершенной управляющей системой, требующей применения микро-ЭВМ или микропроцессоров.
Третье поколение роботов — это интеллектуальные роботы, отличающиеся сложностью функций и совершенством управляющей системы, включающей в себя те или иные элементы искусственного интеллекта, способные формировать модель внешней среды с той или иной степенью детализации, распознавать и анализировать сложные ситуации.
Ведущие технологически развитые страны (США, Великобритания, Франция, Китай, Израиль, Южная Корея) активно разрабатывают робототехнические комплексы, способные с высокой степенью автономности вести боевые действия без участия человека. Так, в армии США планируется к 2030 г. довести долю беспилотных средств до 30 % от общего состава боевых машин. По оценкам американских военных специалистов, боевые возможности подразделений, оснащенных робототехническими комплексами, возрастут в 2.2,5 раза [3].

Производимые отечественной промышленностью роботы и робототехнические комплексы военного назначения можно отнести к первому поколению роботов, так как они обладают ограниченными функциями автоматического движения и управляются оператором.
Базовым понятием в военной робототехнике является определение робототехнического комплекса (средства) военного назначения, представляющего собой принципиально новый, перспективный класс вооружения, военной и специальной техники.
Робототехнический комплекс преодоления минно-взрывных заграждений — это совокупность функционально связанных робототехнических средств проделывания проходов в минно-взрывных заграждениях и технических средств управления ими, объединенных для обеспечения преодоления минно-взрывных заграждений войсками.
Его применение целесообразно, когда работа экипажных средств невозможна или сопряжена с большими потерями личного состава и техники.
Робототехническое средство проделывания проходов в минно-взрывных заграждениях — это конструктивно обособленное безэкипажное изделие военной техники, предназначенное для обнаружения мин и взрывоопасных предметов и их уничтожения взрывным (механическим) способом при автономном либо дистанционном управлении.
Успешное преодоление минно-взрывных заграждений будет обеспечиваться за счет высокой автоматизации управления, внедрения технологий искусственного интеллекта и достижения на этой основе принципиально новых тактико-технических характеристик робототехнических комплексов, недоступных пилотируемым (экипажным) средствам.
Анализ развития робототехники в армиях иностранных государств (США, Германии, Великобритании) показывает, что в них активно ведутся работы по созданию новых высокоэффективных противоминных систем, способных обнаруживать заграждения и с ходу проводить разминирование.
С этой целью в армии США созданы:
• система разминирования JAMC;
• авиационная система разведки противодесантных заграждений COBRA ;
• авиационная система обнаружения и разведки мин AMDAS;
• система разминирования DEMNS.
Другой разработкой является минный трал «Мини-Флэйл». Трал разрабатывается для легких формирований и предназначается для уничтожения (подрыва или разрушения) противопехотных мин.
Машина выполнена на базе колесного погрузчика «Джон Дир 375» и оснащена вращающимся валом с цепями, укрепленным на подпружиненной раме. Управление машиной осуществляется дистанционно оператором, располагающимся на движущимся на некотором удалении автомобиле. Опытные образцы трала многократно испытывались и совершенствовались. Два образца в 1996 г. были отправлены в Боснию для применения в реальной обстановке миротворческими силами США (16-м инженерным батальоном 130-й инженерной бригады).
В армии Германии разрабатывается система дистанционного обнаружения и преодоления минных полей MMSR, объединяющая в себе средства разведки и преодоления минных заграждений.
Средство разминирования представляет собой дистанционно управляемый минный трал массой 8 т на специальной базе, перевозимый на грузовом автомобиле. Его оборудование позволяет имитировать магнитные, тепловые, акустические и сейсмические поля боевых бронированных машин для инициирования подрыва мин с неконтактными взрывателями. Мины с взрывателями нажимного действия подрываются специальными шагающими устройствами, расположенными впереди трала. Средство способно проделывать сплошной проход в минном поле шириной до 2,8 м при скорости траления до 7 км/ч. Подрыв мин и характер повреждений фиксируются видеокамерами, установленными на машине управления.
Кроме того, в ФРГ разработана малогабаритная радиоуправляемая двухосная машина разминирования KMR-1 «Кобра» с дальностью управления до 2 км.
В Великобритании разработана гусеничная машина МК-8 массой 240 кг, предназначенная для уничтожения, обезвреживания или перемещения неразорвавшихся боеприпасов. Дальность управления от 100 до 300 м.
В Вооруженных Силах Российской Федерации применение робототехнических комплексов пока не носит системного характера. Имеются лишь отдельные факты использования роботов в военных конфликтах низкой интенсивности и против низкотехнологичного противника. Например, подразделениями инженерных войск в ходе разминирования Пальмиры, Алеппо и Дейр-эз-Зора активно применялся робототехнический комплекс «Уран-6» (рис. 4).

В современном бою войска могут столкнуться с заграждениями на всех этапах боевых действий:
• при занятии исходного района и во время нахождения в нем;
• при выдвижении и развертывании в боевые порядки;
• в ходе атаки переднего края противника;
• при действиях в глубине его обороны.
Преодоление минно-взрывных заграждений войсками осуществляется, как правило, по проходам или в обход.
Проходы в разведанных минно-взрывных заграждениях и разрушениях, устраиваемых противником, проделываются взрывным, механическим способом или вручную. Для преодоления минно-взрывных заграждений противника войсками в настоящее время используются приборы поиска, средства механического траления мин и установки разминирования.
Выполнение задачи осуществляется, как правило, на дальности эффективного огня средств поражения противника. При этом дальность подачи заряда разминирования отечественных установок разминирования не превышает 500 метров. Таким образом, живучесть установок разминирования и их расчетов как приоритетных целей будет стремиться к нулю.
Повышение результативности и качества проделывания и содержания проходов возможно за счет применения робототехнических комплексов, обеспечивающих гарантированное выполнение задачи в любых тактических условиях в полном объеме, без привлечения для этих целей личного состава.
Данный комплекс должен выполнять в пределах запланированного прохода ряд задач, к которым относятся:
• поиск и обозначение мин и взрывоопасных предметов и их уничтожение (обезвреживание);
• обозначение границ оборудованного прохода;
• организация комендантской службы для пропуска через проход техники и личного состава.
• К основным условиям применения подобного комплекса можно отнести следующие: глубина отдельных минно-взрывных заграждений противника будет превышать 600 м;
• минно-взрывные заграждения будут находиться на маршрутах выдвижения войск, рубежах развертывания в боевые (предбоевые) порядки, перед передним краем и в глубине обороны противника, будут прикрываться огнем его средств поражения;
• применение мин любых типов с массой взрывчатого вещества до 8 кг;
• применение заграждений из мин с широкой зоной поражения, таких как М 93 Hornet;
• применение самовосстанавливающихся минных полей;
• радиоэлектронное противодействие противника.
Исходя из этого, можно сформировать основные тактические требования, предъявляемые к робототехническому комплексу преодоления минно-взрывных заграждений.
Перспективные робототехнические комплексы могут быть двух видов: наземный, в котором необходимое для проделывания проходов оборудование скомпоновано на наземной платформе: и воздушный, робототехническими средствами которого являются только беспилотные летательные аппараты (дроны).
Наземный комплекс преодоления минно-взрывных заграждений должен включать в себя:
• робототехническое средство разведки на базе беспилотного летательного аппарата со встроенной аппаратурой поиска мин;
• робототехнические средства проделывания прохода в минно-взрывных заграждениях на базе дистанционно управляемого бронированного шасси;
• пункт управления робототехнического комплекса.
• С учетом тактических условий выполнения задачи к комплексу можно предъявить следующие требования: дальность управления до 5 км, возможность программирования на выполнение задачи по указанному маршруту;
• проделывание проходов может осуществляться разными способами: взрывным — с применением удлиненных зарядов разминирования, расстрелом обнаруженных мин с применением стрелкового оружия, лазерных установок, выжиганием электронного оборудования мин с применением СВЧ-оборудования;
• возможность проведения разведки участка местности на наличие мин с широкой зоной поражения шириной до 200 м;
• проделывание проходов шириной не менее 6 м;
• возможность обозначения прохода односторонними указками по границам не менее чем через 25 м;
• высокий уровень защиты по классификации STANAG 4569 и малые габариты, снижающие вероятность его поражения;
• наличие средств борьбы с самовосстанавливающимися минными полями, способных воздействовать на их интеллектуальную программу построения;
• время автономной работы не менее 12 часов;
• наличие функций возвращения в исходный район и самоликвидации при угрозе захвата противником.
Наиболее очевидным недостатком подобных комплексов будет высокая уязвимость его робототехнических средств проделывания проходов от огня средств ближнего боя противника. То есть прироста результативности выполнения задачи с их применением в бою ожидать не приходится.
Второй вариант робототехнического комплекса отличается структурным построением и порядком проделывания проходов в минно-взрывных заграждениях.
Воздушный комплекс преодоления минно-взрывных заграждений должен в себя включать:
• средства поиска и уничтожения минно-взрывных заграждений на базе дрона с программой поиска мин и прикрепленным к нему зарядом взрывчатого вещества для уничтожения мин, взрывоопасных предметов — «дроны-саперы»;
• средства обозначения границ прохода на базе дрона с аппаратурой передачи сигнала о границе прохода — «дроны-указатели»;
• пункт управления робототехнического комплекса.
В основе порядка проделывания проходов будет применение «роя» «дронов-саперов», построенного в соответствии с командой оператора в назначенном секторе, на указанных дистанциях, действующих с определенным темпом поиска, обеспечивающим обнаружение мин и взрывоопасных предметов. При обнаружении мины (взрывоопасного предмета) «дроном-сапером» на пункт управления комплекса передается сигнал об ее обнаружении и производится уничтожение при помощи прикрепленного заряда взрывчатого вещества. Место отработавшего «дрона-сапера» занимается следующим за ним в построении дроном.
По окончании проверки «дронами-саперами» указанного оператором сектора и определенного для движения техники прохода по команде оператора через определенные промежутки на его границах осуществляют посадку «дроны-указатели». Они включают аппаратуру, предупреждающую механиков-водителей танков, БМП, БТР об опасном сближении с границей прохода. Рабочие места механиков-водителей боевых машин должны быть оборудованы информационной аппаратурой для приема сигналов от «дронов-указателей».
На пункте управления робототехнического комплекса должен осуществляться комплекс мероприятий по подготовке, обслуживанию и управлению «роем» дронов.
В отличие от наземного, воздушный комплекс может найти свое применение при решении большинства тактических задач наступления. Кроме того, малые габариты дронов будут затруднять их поражение как средствами ПВО, так и стрелковым оружием. Высокая скорость дронов и их независимость от условий местности обеспечит их быстрое перемещение к месту выполнения задачи. Возможность изготовления в войсковых условиях ряда комплектующих деталей в оборудованной 3D принтером мастерской пункта управления и последующей узловой сборки изделия обеспечит низкую стоимость и быструю восполняемость потерь.
По материалам открытых источников [4], применение роя дронов в военных целях активно развивается в армиях наиболее развитых стран мира. На авиационной базе в Калифорнии (США) 25 октября 2016 года прошли успешные испытания крупнейшего в мире роя дронов, состоящего из 103 аппаратов Perdix, напечатанных на 3D принтере. Во время испытаний группа дронов продемонстрировала ряд уникальных возможностей роевой формации, в том числе коллективное принятие решений, адаптивное изменение строя на лету и самовосстановление группы. Каждый из дронов в роевой системе американской армии поддерживал связь с другими дронами. Отсутствие лидера среди дронов позволяло рою успешно переживать потерю отдельных единиц и продолжать скоординированные действия. По мнению военного руководства США, такие группы из дешевых одноразовых дронов способны эффективно выполнять сложные задачи, для которых сейчас применяются большие, дорогие аппараты. К тому же отпадает необходимость в постоянном управлении со стороны человека. Более того, в отсутствии человека рой действует гораздо эффективнее, поскольку быстрее принимается решение и следует мгновенная реакция на внешние факторы. Данный эксперимент был признан удачным. Подобные исследования проводятся в армиях Китая, Турции.
В России группой инженеров из Сколково создана система, которая позволяет управлять группой дронов с помощью движений рук. Разработчики отработали несколько сценариев использования роя, в том числе движение через огороженную трассу и или массив препятствий [5].
Таким образом, наиболее перспективным направлением развития средств преодоления минно-взрывных заграждений представляется создание для этих целей воздушного робототехнического комплекса, который, возможно, позволит решить актуальную на сегодняшний день проблему преодоления войсками заграждений.
Робототехнические комплексы преодоления минно-взрывных заграждений, устраиваемых противником, способны повысить результативность и качество рассматриваемой задачи за счет исключения ошибок исполнителей, повышения уровня стрессоустойчивости и эмоциональной уравновешенности. Важным результатом применения робототехнических комплексов станет снижение потерь в подразделениях, задействованных для проделывания проходов в заграждениях и разрушениях противника.
В результате внедрения робототехнического комплекса преодоления минно-взрывных заграждений следует ожидать повышение живучести преодолевающих заграждения и разрушения мотострелковых и танковых подразделений, сохранения темпов наступления соединений и воинских частей и, как следствие, повышения вероятности достижения цели наступательных действий.
ЛИТЕРАТУРА:
1. Веремеев Ю.Г. Мины вчера, сегодня, завтра: книга — [информационнный источник] URL: http://www/kalasnyikov.hu/dokumentumok/veremeev (дата обращения 28.11.2019).
2. История создания металлоискателей: отечественное развитие: статья [информационнный источник] URL: https://www.mdregion.ru/o-kladoiskatelstve/28.(дата обращения 28.11.2019).
3. Робототехнические средства (комплексы) и системы военного назначения: лекция. — М.: ФГБУ «ГНИИЦР», 2017.
4. Пентагон успешно применил рой из 103 беспилотников: //habr.com/ru/post/400507/.(дата обращения 28.11.2019).
5. В Сколково разработали виброперчатку для управления роем дронов: статья [информационнный источник] URL: https://iot.ru/gadzhety/v-skolkovo-razrabotali-vibroperchatku-dlya-upravleniya-roem-dronov. (дата обращения 28.11.2019).
И. ДЕМЕНТЬЕВ, доктор военных наук, подполковник,
С. РЫЖИКОВ, подполковник